μPAP——水下定位系统
来源:
|
作者:toptechmaritime
|
发布时间: 2020-03-11
|
5528 次浏览
|
🔊 点击朗读正文
❚❚
▶
|
分享到:
μPAP可用于定位ROV、拖鱼、潜水员及其他水下目标物,探测距离可达数千千米。
|
 系统在超短基线模式下,可以测量出水下信标的距离和方位,并且计算出三维的坐标信息,展示在局部坐标系或者地理坐标系中,μPAP 采用小巧轻便的设计理念,使其可以非常方便的安装在船只或者水面的其他平台上,系统可以与Kongsberg 生产的所有水下信标进行匹配,量程最高达 4000m。 系统在超短基线模式下,可以测量出水下信标的距离和方位,并且计算出三维的坐标信息,展示在局部坐标系或者地理坐标系中,μPAP 采用小巧轻便的设计理念,使其可以非常方便的安装在船只或者水面的其他平台上,系统可以与Kongsberg 生产的所有水下信标进行匹配,量程最高达 4000m。
μPAP 系统同时还具备完整的长基线校准和定位功能。μPAP 系统得益于Cymbal 声学通讯技术,其提供宽带信号用于声学定位和数据传输。内置姿态传感器用于进行姿态补偿(横摇与纵摇),由于市场的需要,μPAP 换能器可内置不同的姿态传感器,对应的换能器尺寸也会有所不同。
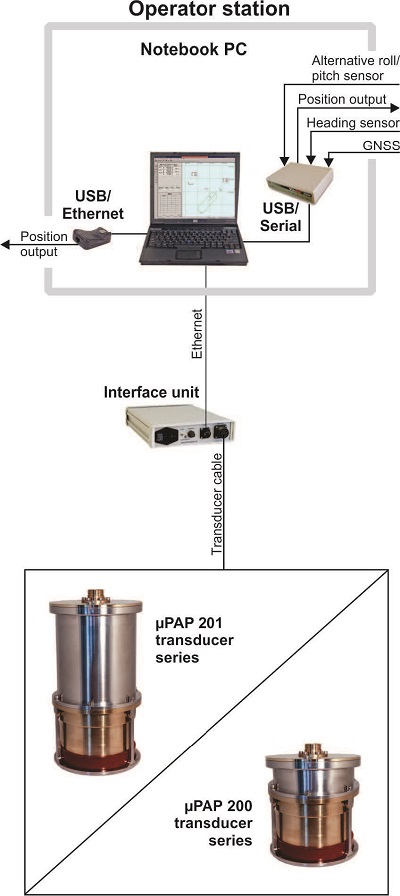
μPAP 系统模块
μPAP 的换能器
基元数量的多少与系统定位性能使成正相关的,更多的基元可以提高声学冗余、数学冗余和信噪比。所有的 μPAP 型号都专注于采用窄角度监听波束来定位跟踪信标,并且采用先进的信号处理技术。窄角度波束可以很好的抑制多路径噪音且提供高信噪比(S/N)。这对于提高角度定位精度是非常重要的,更长的量程,更好的一致声学反射带来的负面作用。
姿态传感器
μPAP 系统通过安装船只或者平台下方的换能器进行水下定位,因此利用姿态传感器对于船只运动的补偿是最关键的。水下目标物的定位精度由 μPAP 系统误差和姿态传感器误差两方面决定。
工作站和显示单元——APOS
μPAP 系统采用同样的工作站和人机交互系统且通常包含一台笔记本。工作站具备所有的用户接口并且控制换能器,运行基于 Windows 的处理软件,软件内置了在线帮助系统,描述了所有的声学定位系统和数据传输功能。
导航和外部接口
μPAP 系统需要从外围接口接入罗经和GNSS 信号,从而可以提供水下目标物的全局坐标系。GNSS 信号的输入使得在地图上叠加水下目标物的坐标。同时声速仪数据的输入可以使得系统进行声学弯曲补偿。
Transponders和Responders
水下目标物必须安装 Transponders 或Responders 才能进行定位。Transponder 通过声学进行触发,而Responder 通过由电缆传输过来的脉冲信号触发。
μPAP 型号及基本参数
|
产品信号
|
换能器
|
覆盖
范围
|
超短基线模式下
斜距测量精度
|
超短基线模式下
角度测量精度
|
内置姿态
传感器
|
姿态传
感器精度
|
最大测量
距离(m)
|
|
μPAP 200
|

|
160°
|
0.45%
|
0.25°
|
LOW COST
|
<1.0°
|
4000
|
|
μPAP 200-NEL
|

|
160°
|
0.45%
|
0.25°
|
LOW COST
|
<1.0°
|
995
|
|
μPAP 201-2
|

|
160°
|
0.45%
|
0.25°
|
MRU-2
|
0.1°
|
4000
|
|
μPAP 201-3
|

|
160°
|
0.45%
|
0.25°
|
MRU-2
|
0.08°
|
4000
|
|
μPAP
201-3-NEL
|

|
160°
|
0.45%
|
0.25°
|
MRU-2
|
0.08°
|
995
|
|
μPAP 201-H
|

|
160°
|
0.45%
|
0.25°
|
MRU-2
|
0.05°
|
4000
|
|
μPAP
201-MGC***
|

|
160°
|
0.45%
|
0.25°
|
MRU
MGC-R3
|
>0.01°
|
4000
|
μPAP 的应用领域
© 渔业、水产业
© 水下工程
© ROV 作业支持
© 浅水调查
© 大洋可再生能源
© 潜水员作业支持
© 海洋勘探调查
|