|
随着EM 2040P 便携版浅水多波束系统(PHS)的发布,KONGSBERG 将先进的、复杂的多波束技术与 Seapath 的GNSS 技术结合。组成了的性能优良、便携轻巧的适用于很多船只的浅水多波束测深系统。

EM 2040 和Seapath 结合数十年的经验和技术,基于KONGSBERG 工业一体化集成技术,生成“拆箱即用”解决方案——EM2040P 集成化的浅水测深解决方案。对于EM 2040P系统来说,灵活性和便携性是至关重要的。系统存放在轻便牢固的运输箱里,易于携带。该系统的高度集成化减少了安装、校准和设置时间,而不会影响测深性能。预校准的MRU 和SV 探头,单根电缆的连接和系统包含的安装组件使得整套系统的布放非常的高效。
此外,基于对的升沉/横摇/俯仰精度的不同要求,系统可以选配KONGSBERG 任何型号的MRU ,增加了对不同项目和船只的适应性。
EM 2040P 浅水多波束测深仪
EM2040P 是基于前沿的 KONGSBERG EM
2040 技术平台开发的浅水多波束测深仪。其非常轻便,采用易于运输、快速布放设计理念,适用于很多船只,同时其性能达到且超过 IHO-S44 特殊标准,满足更加严格的LINZ要求。它是高分辨率制图、检测、浅水测绘等多种应用的理想工具.。

EM 2040P 是KONGSBERG 新型的、先进的浅水多波束测深仪。和KONGSBERG 其他多波束一样,当系统采集数据时,姿态、位置和声速测量用于补偿动态环境和平台的影响。系统在采集数据的同时使用了先进的底部跟踪和数据过滤算法。
通过这两点技术能得到非常有效的水深数据,即一旦采集后几乎不需要进行数据过滤,这样就减少了后处理所需要花费的时间。虽然这些改正是在数据采集时自动进行的,但是所有的原始数据都以数据报格式保存,从而允许用户在后处理过程中(如果需要的话)返回并更改声速值或系统偏移量等参数。同时系统的频率可在200、300和400千赫之间选择。在200 kHz 时,EM 2040P 范围和扫描带宽度最大,而400 kHz 频率提供更高的分辨率。频率可手动选择,避免干扰其他声纳设备。

EM 2040P 采用了很多KONGSBERG 深水多波束具备的先进技术,包含:
双扫描带能力,在一个ping 内100% 沿轨道覆盖,允许在高测量速度下沿轨道有足够的探测密度
FM调频功能,得到更大的测深能力,获得很好的覆盖范围,减少噪音干扰,取得更高的分辨率
完整的roll(横摇)和pitch(纵摇)稳定功能
实时Yaw(偏航)稳定(只有康斯堡浅水多波束回声测深仪支持此功能)
近场聚焦功能(发射和接收)
多个发射扇区,抑制多路径干扰
多点探测功能利用相位和振幅信息使得通过每个波束能生成多达10 个额外的水深点,分成7 级别,以可视化
水中的垂直物体
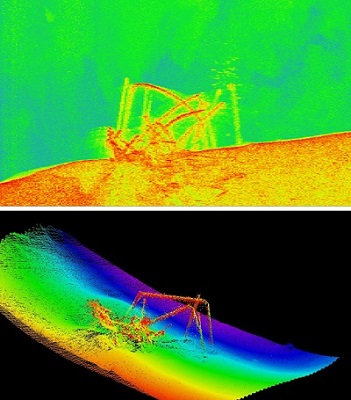
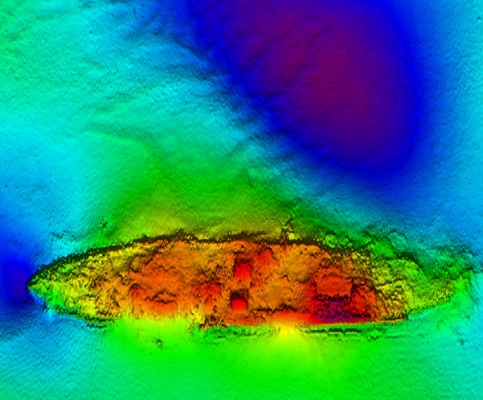
EM
2040P 实测数据
Sespath
130系列
Seapath 130 系列是专为便携式水文测量工作开发的,高精度的航向、位置、横滚、俯仰、升沉和时间是测量的关键。它结合了先进的双频GNSS 接收机,惯性技术和处理算法在一个紧凑的便携式系统里。

易于安装
系统主要的部件是安装在顶部的传感器部分,内置了GNSS 天线和接收机。在多波束换能器的上方,MRU 安装在一个轻巧的水下密封罐里。连接笔记本电脑(PC)可以访问Seapath软件进行配置和监控。
多种型号可选择
Seapath 130系列具备以下几种配置:
Seapath 130-3, 配置了MRU 3,roll和pitch精度为0.08°
Seapath 130-H, 配置了 MRU H,roll和pitch精度为0.03°
Seapath 130-5, 配置了 MRU 5,roll和pitch精度为0.02°
Seapath 130-5+, 配置了 MRU 5+MK-II,roll和pitch精度为0.008°
解决方案
先进的Seapath 导航算法集成了RTK GNSS 数据和来自MRU 的惯性传感器数据。这使得相对于单一的RTK产品,Seapath 130 具备的优点。Seapath 高精度的roll(横摇)、pitch(纵摇)和heading(艏向)测量值使得RTK天线位置可以被引到船上任何需要精确位置和速率的点。所有的数据都被标记了时间戳并且数据输出是实时的。通过下载卫星轨道和时钟数据,结合对卫星和惯性数据的后处理,系统可以达到优于分米级的定位精度。
Seapath 接收GPS 和GLONASS 两种信号,因此具备更高的稳定性、精度和可用性。对于任何可行的差分解决方案诸如IALA、WAAS、Fugro
Seastar XP2/G2 和RTK 都可以进行连续的计算,加权每个卫星的稳定性和精确性,输出当前位置。这些解决方案能获取水平1cm 和垂直平面上2cm 的定位精度。通过SIS (Seafloor Information System).软件可以非常简单的记录原始的GNSS和IMU数据,用于后处理。
|